
Пожалуйста, оставьте нам сообщение

Установки для самодвижущихся борон
Все часто говорят о автоматизации в сельском хозяйстве, и самоходные бороны, конечно, в числе первых, кто вызывает интерес. Но на практике, давайте начистоту, встречаются разные подходы, от неплохо работающих прототипов до решений, требующих серьезной доработки. Часто проблема не в самой идее, а в сочетании различных факторов – от точности навигации до устойчивости на неровной местности. В этой статье хочу поделиться своим опытом и наблюдениями, опираясь на реальные проекты, в которых мы участвовали.
Обзор рынка и текущие вызовы
Рынок автоматизированного земледелия растет, но сегмент автономных борон все еще находится на стадии активного развития. Несмотря на очевидные преимущества – сокращение трудозатрат, повышение эффективности обработки почвы – существуют серьезные технические ограничения. Например, сложность поддержания оптимальной траектории движения в сложных погодных условиях или на участках с высокой влажностью. В Синьцзяне, где мы работаем уже более 20 лет, климат и рельеф предъявляют особые требования к подобной технике. У нас не всегда стабильные погодные условия, а почва часто неоднородная, что создает дополнительные сложности для автономной работы.
Мы внимательно следим за развитием этой области. По сути, многие разработчики фокусируются на адаптации существующих систем автономного вождения, изначально предназначенных для тракторов и комбайнов. Перенос этих технологий на относительно небольшую и подвижную машину, как борона, требует значительной доработки программного обеспечения и аппаратного обеспечения. Необходимо учитывать особенности маневрирования, поддержания оптимальной ширины захвата и обеспечения безопасной работы вблизи препятствий.
Ключевые компоненты и технологические решения
Для реализации проекта самоходной бороны необходим комплексный подход, включающий в себя: систему позиционирования (GPS/GNSS, инерциальная навигация), систему управления движением, датчики для определения типа и состояния почвы, а также систему обработки данных и принятия решений. Очень часто возникают вопросы, связанные с точностью навигации в условиях ограниченной видимости, например, при сильном тумане или в ночное время. Использование лидаров и камер, совместно с GPS/GNSS, может значительно повысить надежность системы позиционирования.
Системы позиционирования и навигации
Выбор системы позиционирования критически важен для автономной работы. GPS/GNSS обеспечивает достаточно хорошую точность в открытых полях, но в условиях плотной растительности или вблизи зданий сигнал может быть ослаблен или отсутствовать. Инерциальная навигация, основанная на использовании акселерометров и гироскопов, позволяет поддерживать точность позиционирования даже в условиях отсутствия сигнала GPS/GNSS, но требует постоянной калибровки и может накапливать погрешности со временем. Мы использовали комбинацию GPS/GNSS и инерциальной навигации в одном из наших прототипов. Результаты были неплохими, но потребовались дополнительные алгоритмы для компенсации погрешностей.
Не стоит забывать и о важности точного определения местоположения бороны относительно обрабатываемой площади. Это требует интеграции с картой поля и использования алгоритмов планирования траектории движения. Мы экспериментировали с различными алгоритмами планирования, но оптимальным оказался подход, основанный на разделении поля на небольшие участки и последовательной обработке каждого участка.
Датчики почвы и система принятия решений
Для эффективной работы автономной бороны необходимы датчики для определения типа и состояния почвы. Эти данные используются для адаптации параметров обработки почвы, например, для регулировки глубины и ширины захвата. Например, при обнаружении участков с высокой влажностью необходимо увеличить глубину обработки, чтобы избежать образования комьев. В качестве датчиков мы использовали ультразвуковые датчики для определения влажности и оптические датчики для определения текстуры почвы. Эти данные передаются в центральный процессор, который принимает решение о необходимости корректировки параметров работы бороны.
Система принятия решений должна быть способна адаптироваться к изменяющимся условиям. Например, при обнаружении препятствий (например, деревьев или камней) борона должна автоматически изменить траекторию движения, чтобы избежать столкновения. Мы использовали алгоритмы машинного обучения для обучения системы принятия решений на основе данных, полученных в процессе работы. Это позволяет системе постепенно улучшать свою производительность и адаптивность.
Практический опыт и кейсы
Мы участвовали в нескольких проектах по разработке и тестированию автономных борон. Один из самых интересных проектов был связан с обработкой полей под посев зерновых культур в Синьцзяне. Целью проекта было сокращение трудозатрат и повышение эффективности обработки почвы. Мы использовали платформу, основанную на телескопической конструкции бороны и электрических приводах. Управление бороной осуществлялось с помощью центрального процессора, который получал данные с датчиков и управлял движением бороны. В результате проекта удалось сократить трудозатраты на обработку поля примерно на 50%.
Однако, не все шло гладко. В процессе тестирования мы столкнулись с проблемой устойчивости бороны на неровной местности. Борона часто теряла ориентацию и сбивалась с траектории движения. Для решения этой проблемы мы добавили к платформе бороны систему активной стабилизации, которая автоматически корректировала положение бороны в зависимости от угла наклона поверхности. Это позволило значительно повысить устойчивость бороны и улучшить ее производительность.
Перспективы развития и заключение
Автономные бороны – это перспективное направление в развитии сельского хозяйства. Несмотря на существующие технические ограничения, технологии продолжают развиваться, и в будущем можно ожидать появления более надежных и эффективных решений. Ключевыми направлениями развития являются: улучшение систем позиционирования и навигации, разработка более точных датчиков почвы и алгоритмов машинного обучения для принятия решений.
Важно понимать, что автоматизация сельского хозяйства – это не просто замена ручного труда машинами. Это комплексный процесс, требующий интеграции различных технологий и оптимизации рабочих процессов. Успех в этой области зависит от тщательного планирования, накопления опыта и постоянного совершенствования технологий. И, конечно, от учета специфических условий работы на каждом конкретном поле. Надеюсь, мой опыт будет полезен тем, кто занимается разработкой и внедрением самоходных борон.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Борона приводная складная 3,5 м
Борона приводная складная 3,5 м -
 Аксессуары
Аксессуары -
 Умная беспилотная газонокосилка
Умная беспилотная газонокосилка -
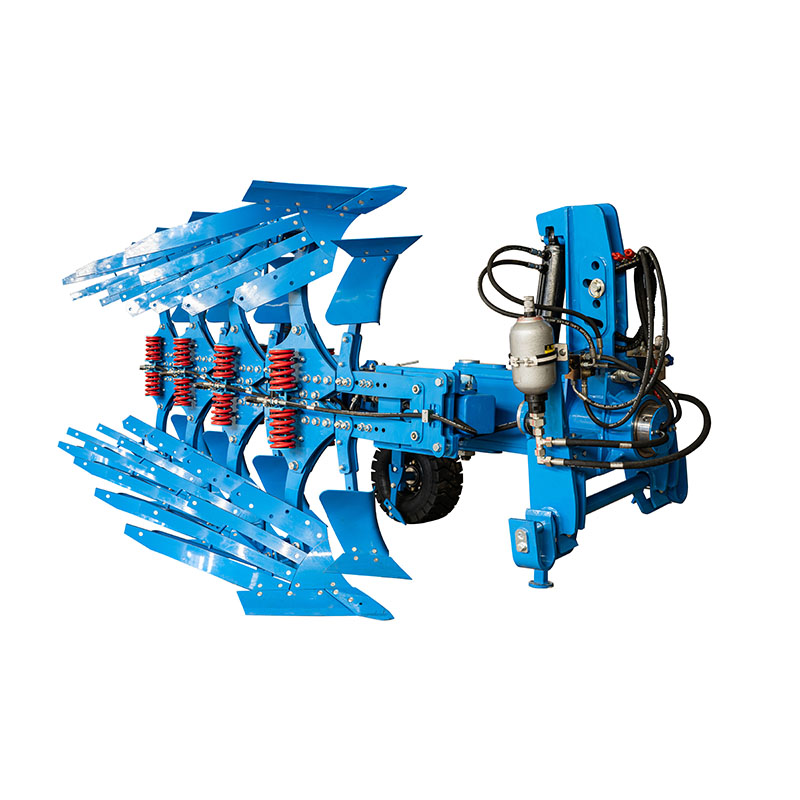
 4-лемешный оборотный плуг с двойным гидравлическим винтом
4-лемешный оборотный плуг с двойным гидравлическим винтом -
 Борона приводная складная 4,0 м
Борона приводная складная 4,0 м -
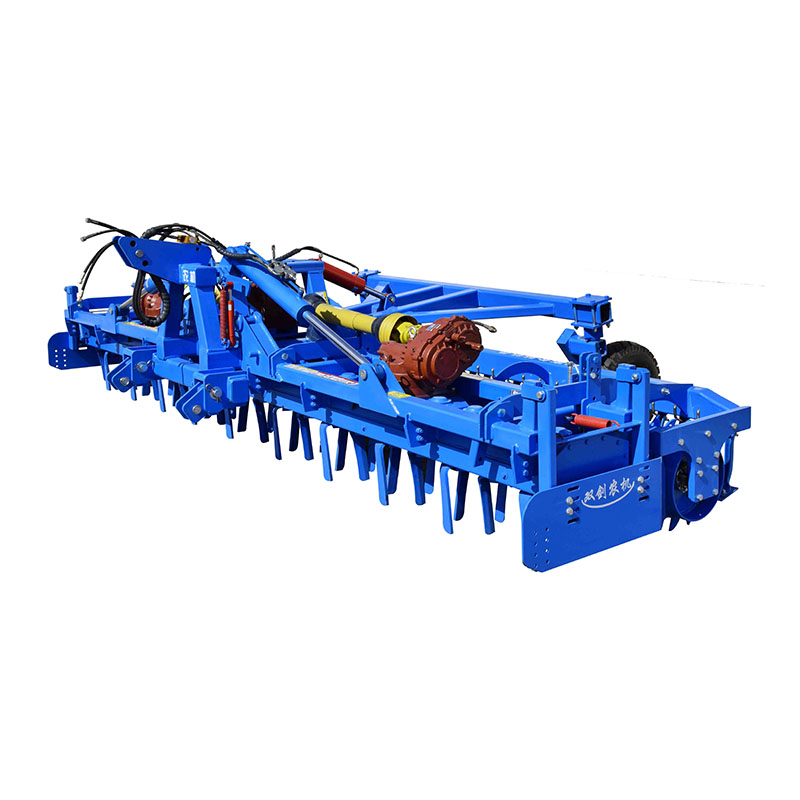
 Складной комбинированный почвообрабатывающий агрегат 4,8 м
Складной комбинированный почвообрабатывающий агрегат 4,8 м -
 Борона приводная складная 5,0 м
Борона приводная складная 5,0 м -
 Интеллектуальный беспилотный аппарат для дозирования кукурузных початков
Интеллектуальный беспилотный аппарат для дозирования кукурузных початков -
 Борона приводная складная 7,0 м
Борона приводная складная 7,0 м -
 3-лемешный оборотный плуг с пружинной защитой (безостановочный)
3-лемешный оборотный плуг с пружинной защитой (безостановочный) -
 Борона приводная с прямым ящиком 4,5 м
Борона приводная с прямым ящиком 4,5 м -
 4-лемешный оборотный плуг с пружинной защитой (безостановочный)
4-лемешный оборотный плуг с пружинной защитой (безостановочный)
Связанный поиск
Связанный поиск- плуг оборотный 8
- Ведущие покупатели сельскохозяйственной техники для использования
- Глубокорыхлительные орудия
- Производители сеялок точного высева
- Производители 4.2-метровых культиваторов
- сеялка 8
- Организации-производители сельскохозяйственной техники
- корпус оборотного плуга
- Высокоэффективная активная борона
- Основные страны-покупатели сеялок

